コンテンツ
はじめに
本記事では、ロボットアームを用いたTLC (薄層クロマトグラフィー) の自動化プロジェクトについて紹介します。化学研究者や技術者の日常的な作業の一つであるTLCを効率化することで、作業時間の短縮や精度向上を目指すこのプロジェクトについて、背景、課題、解決策、実装方法、成果と効果、今後の展望について解説していきます。
詳細な説明
背景
TLCは化学研究や製薬業界で広く用いられる分析手法であり、サンプルの同定や純度の確認などに利用されます。しかし、従来の手動でのTLC操作は、作業者の技量に依存し、再現性や効率が低いという課題がありました。
課題
本プロジェクトで解決すべき課題は以下の通りです。
- TLC操作の効率化
- 再現性の向上
- 作業者の負担軽減
解決策
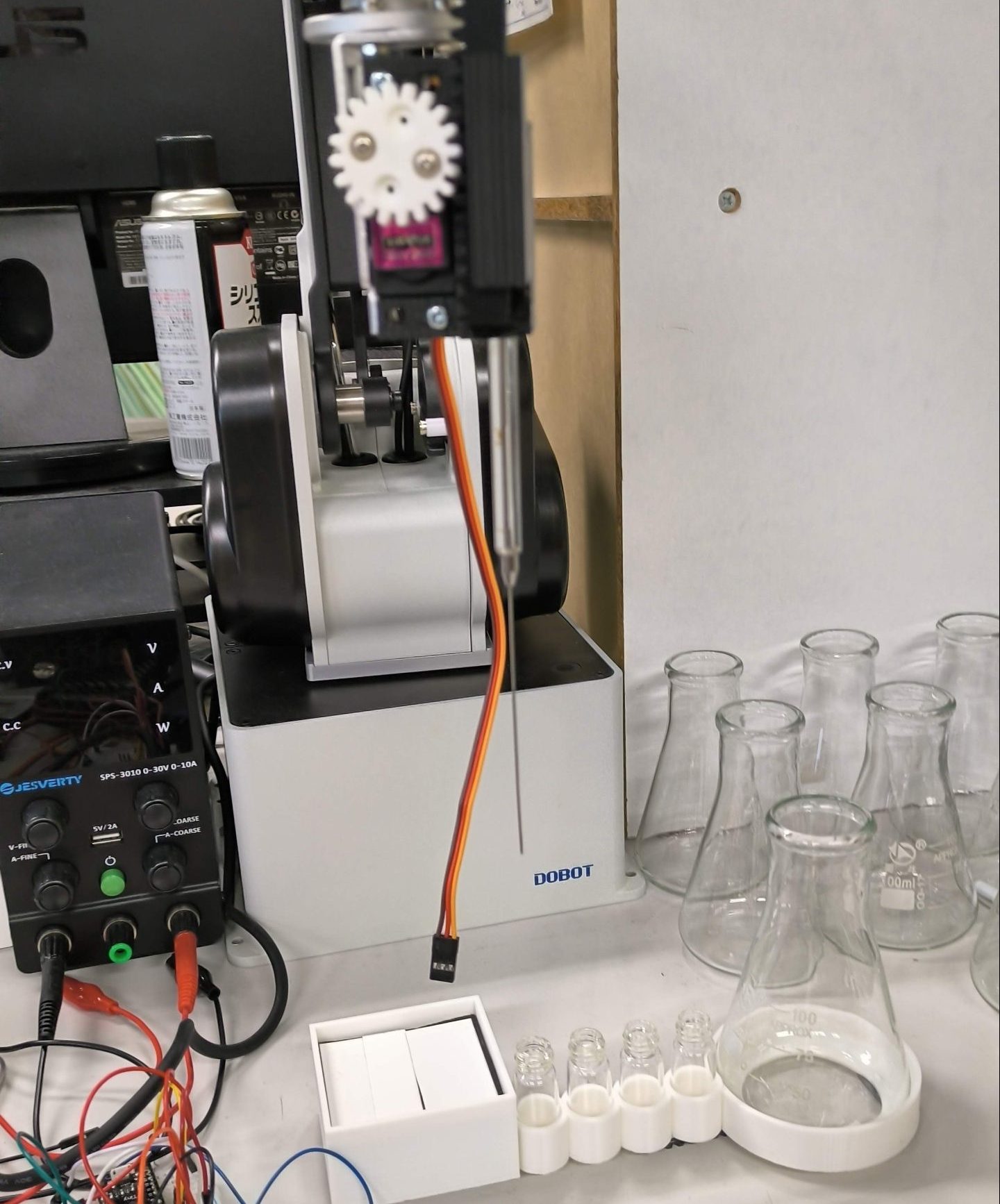
ロボットアームを用いたTLC自動化システムを開発することで、上記の課題を解決します。このシステムでは、ロボットアームがサンプルの吸引、TLCプレートへのサンプル排出、シリンジの洗浄といった一連の操作を自動で行います。
実装方法
ロボットアーム自動化の動作は以下の通りです。
- シリンジエンドパーツでサンプルの入った三角フラスコからサンプルを吸引する
- TLCプレートにサンプルを排出する
- きれいな溶液の入ったバイアルから溶液を吸う
- 廃液用のバイアルに溶液を捨ててシリンジの洗浄を行う
- フラスコ、バイアル、TLCプレートは、3Dプリンターで作ったケースで固定

成果と効果
本プロジェクトにより、TLCの操作時間が大幅に短縮され、研究者や技術者の作業効率が向上しました。また、ロボットアームによる自動化により、人間の操作に起因するミスが減少し、分析結果の再現性が向上しています。さらに、作業者の負担が軽減されることで、より研究や開発に集中できる環境が整いました。
今後の展望
今後のプロジェクトでは、ロボットアームの動作精度や速度をさらに向上させることで、TLC自動化システムの性能をさらに向上させることを目指します。また、他の分析手法への適用や、さらなる省力化・効率化を図るための機能追加も検討しています。このような取り組みにより、化学研究や製薬業界の効率化と発展に貢献していくことが期待されています。
まとめ
本記事では、ロボットアームを用いたTLC自動化プロジェクトについて紹介しました。このプロジェクトにより、TLC操作の効率化、再現性の向上、作業者の負担軽減が実現されており、化学研究や製薬業界における省力化と効率化に貢献しています。今後も、システムの性能向上や他の分析手法への適用を目指して取り組んでいくことが期待されています。